Adaptive Inverse for Actuator Compensation (AIFAC) Simulink Toolbox
Why the AIFAC Toolbox?
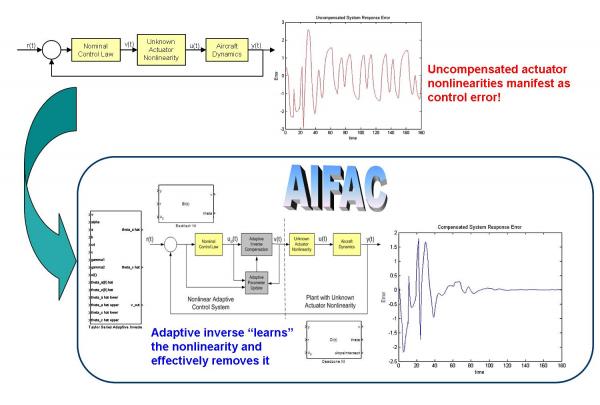
Actuator nonlinearities such as dead-zone, backlash, and hysteresis are ubiquitous in mechanical connections, hydraulic servo-valves, electric servomotors, piezoelectric, pneumatic and magnetic actuators, and even appear in biomedical systems. The Adaptive Inverse For Actuator Compensation (AIFAC) Toolbox for Simulnk allows control system engineers to design high-performance adaptive controllers to compensate for uncertain or undesirable actuator dynamics that would otherwise adversely affect closed-loop control system performance.
Importantly, the Simulink Toolbox implementations are compatible with MathWorks real-time rapid prototyping tools, such as Real-Time Workshop. This compatibility allows users to generate code and efficiently produce prototype and production systems that include adaptive inverse algorithms for the accommodation of uncertain nonlinear actuator dynamics.
System Requirements:
AIFAC is Simulink Toolbox, which requires, at a minimum, a license for Matlab and Simulink products from The Mathworks – Release 2007b or later.
System Usage:
The AIFAC toolbox is a collection of reusable Simlink blocks in Simulink library form. After installation, AIFAC appears as a folder within the Simulink library browser. The blocks may be used like any other Simulink component. Each block has an integrated help page.
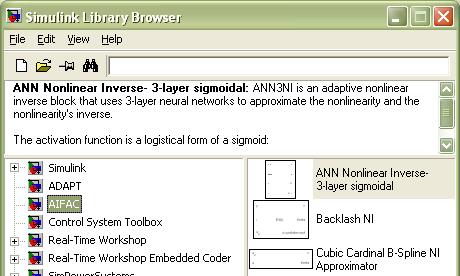
Figure 3: AIFAC Toolbox in Simulink Library Browser
All AIFAC blocks are masked, providing a dialog for entering block parameters, including prompts and help text. Each toolbox component has an integrated help page. This page is accessible by selecting the “Help” menu item on the component’s right-click context menu.
The AIFAC Toolbox contains over a dozen Simulink blocks to improve the performance of systems with backlash, dead-zone, hysteresis, and other nonlinear characteristics.
For pricing and ordering information, contact sales@barron-associates.com
Related Project
Adaptive Control of Synthetic Jet Actuators
Traditionally, optimum aerodynamic performance and control on an airplane wing are achieved with good aerodynamic design of the wing section and the use of deflecting control surfaces. There are,... View ProjectResources
- Deb, D., G. Tao, J. Burkholder, and D. Smith, “Adaptive compensation control of synthetic jet actuator arrays for airfoil virtual shaping,” AIAA Journal of Aircraft, Vol. 44, No. 2, March-April 2007.
- Deb, D., G. Tao, and J. Burkholder, “Adaptive synthetic jet actuator compensation for a nonlinear aircraft model at low angles of attack,” IEEE Transactions on Control Systems Technology, Vol. 16, No. 5, September 2008.
- Deb, D., G. Tao, J. Burkholder, and D. Smith, “An adaptive inverse control scheme for a synthetic jet actuator model,” Proc. of the 2005 ACC, June 2005.
- Deb, D., G. Tao, J. Burkholder, and D. Smith, “An adaptive inverse control scheme for synthetic jet actuator arrays,” AIAA Infotech@Aerospace, Paper No. AIAA-2005-7170, Sept. 2005.
- Deb, D., G. Tao, J. Burkholder, and D. Smith, “Adaptive compensation of nonlinearities in synthetic jet actuators for nonlinear aircraft dynamics,” Proc. of the 2006 ACC, June 2006.
- Deb, D., G. Tao, J. Burkholder, and D. Smith, “Adaptive compensation of nonlinearities in synthetic jet actuators on nonlinear tailless aircraft,” Proc. of the AIAA Guidance, Navigation, and Control Conf., August 2006.
- Deb, D., G. Tao, J. Burkholder, and D. Smith, “Adaptive approximation-based compensation of synthetic jet actuator nonlinearities for aircraft control,” Proc. of the 2007 AIAA Guidance, Navigation, and Control Conf., August 2007.
- Shea, P. R. and Smith, D. R., “Aerodynamic control of a wing at low angles of attack using a synthetic jet and a gurney flap”, AIAA Paper 2008-0601, 46th AIAA Aerospace Sciences Meeting, Reno, NV, 2008.